
-
-
2023-11-30 三差分通道的42闭环步进电机,你了解多少?
三差分通道的42闭环步进电机,你了解多少?三差分通道的42闭环步进电机是一种高性能的步进电机,采用了三差分通道的设计,具有精度高、稳定的特点。下面将对三差分通道的42闭环步进电机进行详细介绍。
-
-
2023-11-22 了解步进电机工作原理,才能正确选择步进电机
步进电机的主要组成部分是定子和转子。定子通常由一系列按一定规律排列的磁极组成,而转子则是由导电材料制成的绕组构成。当电流通过定子的磁极时,磁场就会在空间中形成,而且这个磁场会在一定的方向上旋转。这个旋转的磁场会对转子产生一个吸引力,使得转子开始旋转。
-
-
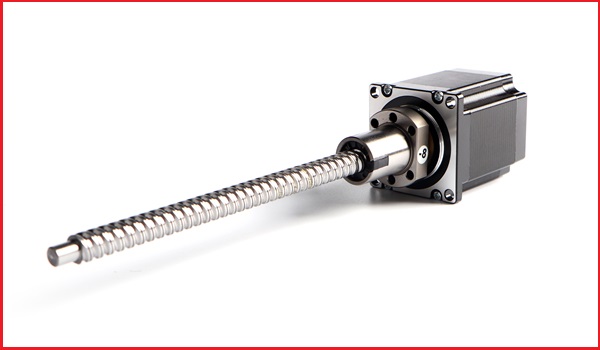
2023-11-20 丝杆步进电机和步进电机的区别,主要在这两点
丝杆步进电机和步进电机的主要区别在于结构和功能上。丝杆步进电机在结构上增加了丝杆结构,可以将电机的旋转运动转化为直线运动;在功能上,丝杆步进电机不仅可以像步进电机一样实现旋转运动,还可以实现直线运动。
-
-
2023-11-15 步进电机和伺服电机的区别,各具特色,各领风骚
步进电机和伺服电机在自动化生产线和高精度机械设备中,各具特色,两者的角色无可替代。步进电机保障了生产过程的连续性和稳定性;而伺服电机则实现了生产效率和产品质量的提升。
-

-
2023-05-02 汉德保行星减速机的优点
下面是汉德保行星减速机的优点:汉德保行星减速机的优点一、传动的精度高。汉德保行星减速机的优点二、体积小、重量轻。汉德保行星减速机的优点三、传动的速比大,可选型多。
-

-
2023-04-13 开环步进电机和闭环步进电机的区别是什么?
步进电机开环与闭环有何区别可以通过这两点来判断:1、开环步进电机没有反馈。 闭环控制需要执行并且报告,要有反馈。2、开环控制一般是在瞬间就完成的控制活动,闭环控制一定会持续一定的时间,可以借此判断。
-
-
2023-04-04 汉德保防爆步进电机的应用简介
汉德保防爆步进电机的精度高,应用的场景多,非常适合那些易燃易爆的危险环境使用。汉德保防爆步进电机没有累积误差等特点,在传动速度和位置控制领域用途广泛。下面列举几个防爆步进电机的应用场景。
-
-
2023-04-03 步进电机共振产生丢步的原因和解决方法
步进电机共振产生丢步的原因和解决方法:步进电机共振产生丢步的解决方法一、根据使用情况减小驱动电流;步进电机共振产生丢步的解决方法二、采用驱动器细分的方法。
-
-
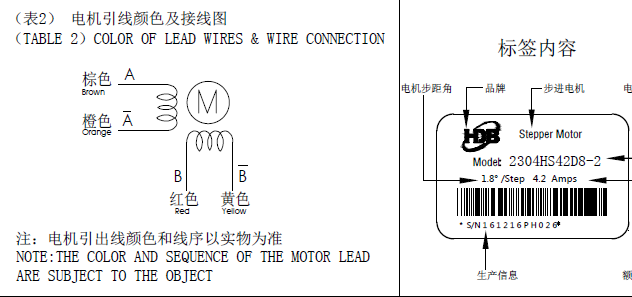
2023-02-07 步进电机接线图,怎么辨别步进电机的线序跟接线方式?
不管是哪个厂家生产的两相步进电机,它的最终出现方式对应的就是4根线。 第一种:使用万用表,调至通断档位,测试步进电机的任意两根相线,若相通,则为一组;反之,则不为一组,需测试另外的相线; 第二种:将任意两根相线连接,手拧电机轴,若产生明显阻力,则两根相线互为一组。反之,则不为一组,需测试另外的相线。
-
-
2022-09-21 减速步进电机中的行星减速机有什么作用?
在常见的自动化设备中,经常看到步进电机加装各种各样的配置,比如:编码器、行星减速机、刹车等等,用来提升步进电机的应用以及性能,那么减速步进电机中的行星减速机有什么作用呢?下面跟随汉德保小编一起了解下吧。
-
-
2022-09-05 为什么步进电机的起跳频率不能设置过高
下面汉德保小编叙述步进电机的起跳频率: 步进电机的起动频率不能过高,这是由于步进电机刚起动时转速为零,在起动过程中,电磁转矩除了战胜负载阻转矩外,还在战胜滚动部分的惯性掩蔽,所以起动时电机的担负比接连工作为重。
-
-
2022-08-25 如何解决在需要先上电后接电机步进驱动器报警缺相的问题呢?
汉德保S系列步进电机驱动器具有检测电机缺相功能,如何解决在需要先上电后接电机驱动器报警缺相的问题呢?是设置有报警功能,使用使能给电再断电开一刷掉报警,也就是通过使能信号可以刷掉报警。
-
-
2022-08-10 二相、三相、五相混合式步进电机的步距角跟线圈组数
二相、三相、五相混合式步进电机是怎么命名的?线圈组数又是多少?二相:2组或者4组,步距角1.8° 三相:3组,步距角1.2° 五相:5组,步距角0.72°
-
-
2022-07-12 步进电机振动大,噪声也很大,什么原因?
步进电机常见问题解答:步进电机振动大,噪声也很大,什么原因?遇到这种情况是因为步进电机工作在振荡区,解决办法:1、改变输入信号频率CP来避开振荡区。2、采用细分驱动器,使步距角减少,运行平滑些。
-
-
2022-06-09 步进电机的型号有哪些?步进电机是哪个尺寸最常用?
步进电机的应用非常普遍了,但是随着问题也越来越多,很多人不知道步进电机的型号,哪些型号常用?哪些尺寸又常规呢?这样避免日后更新换代,能够找到合适的步进电机,下面汉德保小编就为大家讲解一下。

