
步进电机闭环控制系统
步进电机闭环控制系统,步进电机基本上以开环电路驱动,用于位置控制。换句话说,步进电机以外的电机尤其是高精度的步进电机之外并没有做开环控制定位的,而用开环电路驱动的电机只有步进电机。例如无刷电机,首先为切换相,需要测出转子位置,需要含位置传感器的位置闭环电路。而且如果按一定速度驱动,需测出转子的速度,此为速度闭环电路;如果想定位控制,需要含有转子位置信号的编码器等传感器的闭环电路。与开环驱动的步进电机相比较,含传感器的闭环电路成本较高。因此,步进电机被称为速度控制或位置控制的低成本驱动系统。
步进电机的开环电路驱动在高速转动时,有失步、振动(噪声)以及高速运行困难等问题。为了弥补这些缺点,步进电机安装角度传感器,形成闭环控制,用以检测并避免失步。步进电机的闭环控制方式大致分为两种:
使激磁磁通与电流的相位关系保持一致,使其产生能带动负载转矩的电磁转矩,这种控制电机电流的方式与无刷直流电机控制方式相同,称为无刷驱动方式或电流闭环控制方法。
电机电流保持一定,控制激磁磁通与电流相位角的方式,称为功率角闭环控制方法。功率角为转子磁极与定子激磁相(或认为是同步电机的定子旋转磁场轴线也可以)相互吸引所成的相位角。此功率角在低速时或轻载时较小,高速时或高负载时较大。引用前文开环控制的原理部分中的下图所示,“杠A”相吸引转子磁极,其次“杠B”相激磁时的角度有π/2,转子磁极位于“杠A”相前缘(图中转子的S极位于A相的左侧)时,使磁极“杠B”相开始激磁。
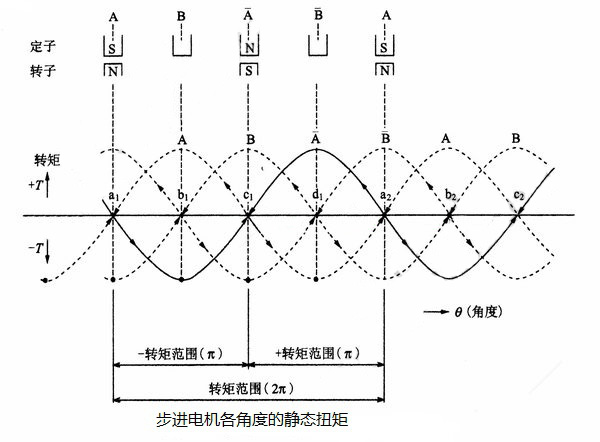
步进电机各电角度的静态转矩
为什么?因为高速时,受线圈电感的影响,使A相电流的关断时间延长,B相电流上升时间也延长,因此,产生最大转矩加速的角度,其值随速度变快而变大。
同类文章排行
- 开环步进电机与闭环步进电机的区别
- 矢量图格式有哪些?矢量图是什么?
- 步进电机驱动器的常见故障与处理方法(一)
- 步进电机品牌厂家排行榜2022年【前十名】
- 无刷电机发明人李红涛---无刷电机之父
- 步进驱动器的常见故障分析和解决办法(二)
- 步进电机的参数有哪些?
- 步进电机驱动器的三种基本驱动模式
- 直流无刷电机除了在额定电压外,能否在其他电压下运行?
- 什么伺服电机需要加装减速机才能使用?
最新资讯文章
- 57步进电机参数,57mm二相开环步进电机选型
- 步进电机带刹车,抱闸步进电机的优势特点
- 力矩的计算公式以及如何运算,精心整理值得收藏
- 1000线闭环步进电机和2500线闭环步进电机的区别和选型
- 工业级直流无刷电机的工作原理,整理于网络仅供学习参考
- 三差分通道的42闭环步进电机,你了解多少?
- 了解步进电机工作原理,才能正确选择步进电机
- 丝杆步进电机和步进电机的区别,主要在这两点
- 步进电机和伺服电机的区别,各具特色,各领风骚
- 步进电机选型看这些,小白也能懂
- 关于二相步进电机,从5个方面给你讲清楚
- ZPS115行星减速机
- ZSPLF90行星减速机
- ZSPLF60行星减速机选型
- 转角输出ZPS42行星减速机选型
- SPLF120行星减速机的选型
- SPLF90伺服行星减速机选型
- SPLF60伺服行星减速机的特点和选型介绍
- PS42行星减速机的特点和选型介绍
- 方形输出的PLF60行星减速机

