
三相反应式步进电机工作原理
三相反应式步进电机工作原理,反应式步进电机原理由于反应式步进电机工作原理比较简单。下面先叙述三相反应式步进电机原理。
1、 结构:
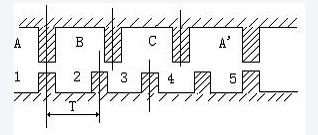
电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图:
2、 旋转:
如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同)。 如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C偏移为1/3て,齿4与A偏移(て-1/3て)=2/3て。如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3て,此时齿4与A偏移为1/3て对齐。 如A相通电,B,C相不通电,齿4与A对齐,转子又向右移过1/3て这样经过A、B、C、A分别通电状态,齿4(即齿1前一齿)移到A相,电机转子向右转过一个齿距,如果不断地按A,B,C,A……通电,电机就每步(每脉冲)1/3て,向右旋转。如按A,C,B,A……通电,电机就反转。 由此可见:电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系。而方向由导电顺序决定。 不过,出于对力矩、平稳、噪音及减少角度等方面考虑。往往采用A-AB-B-BC-C-CA-A这种导电状态,这样将原来每步1/3て改变为1/6て。甚至于通过二相电流不同的组合,使其1/3て变为1/12て,1/24て,这就是电机细分驱动的基本理论依据。 不难推出:电机定子上有m相励磁绕阻,其轴线分别与转子齿轴线偏移1/m,2/m……(m-1)/m,1。并且导电按一定的相序电机就能正反转被控制——这是步进电机旋转的物理条件。只要符合这一条件我们理论上可以制造任何相的步进电机,出于成本等多方面考虑,市场上一般以二、三、四、五相为多。
3、 力矩:
电机一旦通电,在定转子间将产生磁场(磁通量Ф)当转子与定子错开一定角度产生力F与(dФ/dθ)成正比
其磁通量Ф=Br*S Br为磁密,S为导磁面积 F与L*D*Br成正比 L为铁芯有效长度,D为转子直径 Br=N·I/RN·I为励磁绕阻安匝数(电流乘匝数)R为磁阻。力矩=力*半径力矩与电机有效体积*安匝数*磁密 成正比(只考虑线性状态)因此,电机有效体积越大,励磁安匝数越大,定转子间气隙越小,电机力矩越大,反之亦然。
同类文章排行
- 外转子电机和内转子电机的优缺点
- 步进电机接线图图解以及步进电机接线颜色的定义
- 42步进电机参数详细
- 图解步进电机基本结构和工作原理
- 如何实现步进电机正反转方向调节?
- 步距角是什么?步距角是怎么算出来的?
- 伺服电机怎么接线图
- 步进电机接线问题!三张接线图立马帮您解决
- 步进电机的用途及优势特点
- 步进电机四根线怎么接
最新资讯文章
- 57步进电机参数,57mm二相开环步进电机选型
- 步进电机带刹车,抱闸步进电机的优势特点
- 力矩的计算公式以及如何运算,精心整理值得收藏
- 1000线闭环步进电机和2500线闭环步进电机的区别和选型
- 工业级直流无刷电机的工作原理,整理于网络仅供学习参考
- 三差分通道的42闭环步进电机,你了解多少?
- 了解步进电机工作原理,才能正确选择步进电机
- 丝杆步进电机和步进电机的区别,主要在这两点
- 步进电机和伺服电机的区别,各具特色,各领风骚
- 步进电机选型看这些,小白也能懂
- 关于二相步进电机,从5个方面给你讲清楚
- ZPS115行星减速机
- ZSPLF90行星减速机
- ZSPLF60行星减速机选型
- 转角输出ZPS42行星减速机选型
- SPLF120行星减速机的选型
- SPLF90伺服行星减速机选型
- SPLF60伺服行星减速机的特点和选型介绍
- PS42行星减速机的特点和选型介绍
- 方形输出的PLF60行星减速机

